
 13958422526
13958422526 热门搜索: 1 IRM IRM-3638JF ITR1204 EL2501S1(K)(TU)-G 红外接收头 1502 PT67-21C ITR2152S ITR1502 ITR ITR2152 PT11-21C PT91-21C/TR7 IR91-21C 8307 PT91-21C/TR10 PT91-21B ITR1205 光电开关,发射接收管在三大感应的应用
热门搜索: 1 IRM IRM-3638JF ITR1204 EL2501S1(K)(TU)-G 红外接收头 1502 PT67-21C ITR2152S ITR1502 ITR ITR2152 PT11-21C PT91-21C/TR7 IR91-21C 8307 PT91-21C/TR10 PT91-21B ITR1205 光电开关,发射接收管在三大感应的应用  更新时间:2025-12-15
更新时间:2025-12-15 点击次数:
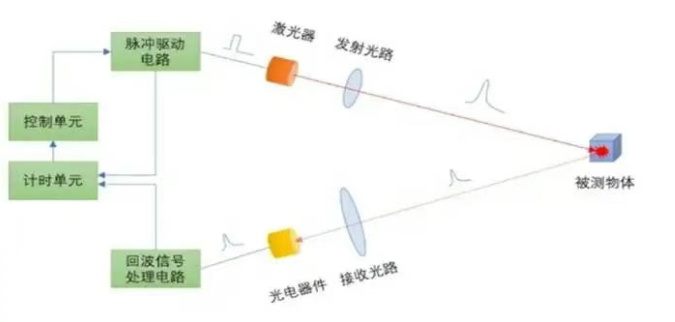
点击次数: 扫地机器人激光雷达上应用到亿光红外发射管、红外接收管、槽型光电开关等,激光雷达是智能导航的核心组件,是一种以发射激光束来探测目标位置、速度等特征量的雷达系统。这个系统也可以通过扫描发射和接收装置来获取目标物体的三维形状,在不同角度发射和接收激光脉冲,可以构建出物体的完整三维轮廓。激光雷达的三角测距原理基于光的发射、传播和接收,最终通过测量光脉冲从发射到接收的时间来确定距离;下图是激光雷达测量距离的基本步骤。
扫地机器人的激光雷达整体外观可以看到有一根皮带是橙色的连接下方电机,通过电机转动皮带带动整个激光头进行转动,外面有塑料壳保护

激光雷达模组去除橙色顶部外壳可以看到,主要由电路板、激光发射管、激光接收部分组成。

拆下上方的激光雷达模组可以看到背面是无线供电线圈,线圈中间的板子是光通信的探测器。
其中光通信探测的型号是亿光电子:PD15-22C/TR8,用于检测上方的红外发射端的信号强度判断信号。

红外发射管型号是亿光电子:IR26-21C/L110/CT(正编)或IR26-21C/L110/TR8(反编)

板子无线供电线圈边上应用了亿光电子的槽型光电开关(ITR系列)
对应亿光电子型号:ITR20403,槽型内部安装进卡槽通过槽型光电开关中间位置进行码盘识别测速。

紅外發射管:IR26-21C/L110/CT、IR26-21C/L110/TR8、HIR26-21C/L423/CT(DY)等
紅外接收頭:PD15-22C/TR8、PD70-01B/TR7
槽型光电开关:ITR20403、ITR1203DT50A/TB

芯光电子一站式供应全系列光电元件:发射管、接收管、接收头、贴片接收头、槽型光电开关、反射式光电开关、红外对管、光耦817、光敏管、贴片发射管、贴片接收管、侧射型红外发射管、侧向型红外接收管、0402/0603/0805/1206等贴片LED、照明2835灯珠等系列产品。


 当前位置:
当前位置: 

 红外线对管
红外线对管
 友情链接:
友情链接: